
Der Legohubschrauber LT 9396 lernt fliegen

 Donnerstag, 13. April 2023 von Andreas G
Donnerstag, 13. April 2023 von Andreas G
Wird der Lego Technic Bausatz LT 9396 fliegen?
Ein Tagebuch mit einem nicht alltäglichen Bauziel
Am Anfang war wie immer eine Idee. Die kam im Frühjahr 2016. Bei mir stand ein Legohubschrauber, auch genannt Legocopter LT9396 zusammengebaut auf dem Schrank, genauer gesagt ein Lego Technik LT 9396 und staubte so langsam ein.

Am Anfang war wie immer eine Idee. Die kam im Frühjahr 2016. Bei mir stand ein Legohubschrauber, auch genannt Legocopter LT9396 zusammengebaut auf dem Schrank, genauer gesagt ein Lego Technik LT 9396 und staubte so langsam ein. Zum Spielen für meine Enkel leider in der Praxis nicht wirklich geeignet, da die Kunststoffgetriebe zur Steuerung der Funktionen einen wenig stabilen Eindruck vermitteln. Beim älteren Nachwuchs entsprechend der angegebenen Altersangabe war der Spieltrieb leider schnell dahin.
Nun gibt es bestimmt schon den einen oder anderen fliegenden Lego-Hubschrauber auf der Welt, aber wenn schon, denn schon. Mein Modell soll dem Original so nah wie möglich kommen.
Meine Anforderungen an dieses Projekt
Er soll natürlich komplett gesteuert fliegen und dazu folgende Funktionen des Originalmodells besitzen
hochgesetztes Heck
4 - Blattrotor
Fahrwerk elektrisch ein- und ausfahrbar
Rettungswinde steuerbar
auf ganz besonderen Wunsch meines Enkels Oliver, die steuerbare Heckklappe
sowie die Zusatzfunktionen: volle Beleuchtung und steuerbarer Arbeitsscheinwerfer
Mit der Beleuchtung wird das Funktionsmodell somit über mehr Funktionen verfügen, als der Originalbausatz. Das komplett montierte Originalmodell brachte 855 Gramm auf die Waage. „Das kann ja was werden“. Die Mechanik schätze ich flugfertig ebenfalls auf 850 Gramm, kommen also am Ende rund 1700 Gramm raus. Natürlich fällt vom Original viel weg, z.B. die ganze Mechanik samt Kopf und Getriebe. Es kommt jedoch auch so einiges hinzu an Servos und Elektronik. Na gut, wir werden sehen…
Aus meiner Sicht gibt es zwei Hauptprobleme, das Gewicht und die passende Mechanik. Für das hochgesetzte Heck ist eine Riemenantrieb erforderlich, denn für die 450iger Klasse gibt keine Heckumlenkungen für Starrantrieb. Leider haben Hersteller wie Align und Co. alle 450iger auf Starrantrieb umgestellt, somit für mich nicht brauchbar. Nach langer Suche und warten auf die entsprechende Lieferfähigkeit konnte ich bei Cloneparts eine Mechanik mit Heckriemenantrieb, dazu einen 4-Blatt-Rotorkopf, Blätter und das Heck ordern.
Der Startschuss ist erfolgt. Inzwischen haben wir Anfang November 2016. Die Mechanik ist eingetroffen, wird von mir geprüft und ich kann mir nun Gedanken machen, wie die Elektrik und Elektronik beschaffen sein soll. Auf Grund der zu erwartenden sehr engen Platzverhältnisse kommt als FlybarlessSystem eigentlich nur einer für alles, also der Graupner GR-18 3xG in Frage. Das System braucht wenig Platz und die gesamte Einstellung erfolgt über die Fernsteuerung.
Für die Taumelscheibe sind die Savöx SH054 und für das Heck ein Savöx 1357 vorgesehen. Einen 40 Ampere Kontronik Jazz Regler und einen passenden Skorpion-Motor habe ich noch im Bestand.
Die vielen „Spielfunktionen“ müssen natürlich auch gesteuert werden. Wie jeder halbwegs fachkundige schnell erkennen kann, reichen die 9 Kanäle des GR-18 für die Flugsteuerung und die Zusatzfunktionen bei weitem nicht aus. Meine Lösung sind 2 Systeme, die ich komplett voneinander getrennt habe.
Für das Hauptsystem, damit meine ich alle Flugfunktionen kommt die Graupner MX-16 Hott in Kombi mit dem GR-18 zum Einsatz. Für das Nebensystem, also alle Zusatzfunktionen nutze ich die Graupner MZ-12 Hott in Kombi mit einem GR-12L. Leider hat sich diese Kombi später als ungeeignet herausgestellt. Dazu am Schluß der Beschreibung mehr.
Für den vollen Flugeinsatz sind also immer Pilot und Copilot erforderlich. Bei 4 Enkeln und den vielen Vereinskameraden, wird wohl sich immer einer finden.

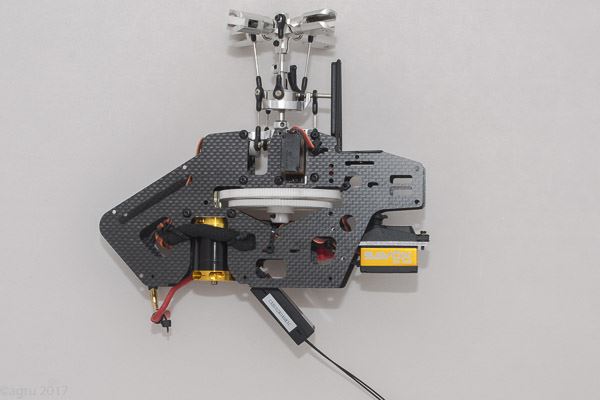
Der Grundrahmen aus zwei Carbon-Seitenplatten und Alu-Verbindungsteilen ist schnell zusammengebaut. Seine Qualität ist besser als erwartet. Ein paar Nacharbeiten sind normal.

Der 4-Blatt-Rotor
So kann der 4-Blatt-Rotorkopf nicht verwendet werden. Er sieht zwar aus der Ferne ganz brauchbar aus, aber im Detail… Naja. Um sicher zu gehen, demontiere ich den kompletten Rotorkopf. – Richtige Entscheidung – Die Verschraubungen sind teilweise zu kurz und die Schraubenköpfe in den oberen Blatthalteranlenkungen sind viel zu weich. Es müssen andere Schrauben her. Nun bekomme mal solche 2,0 mm Schrauben. Bei einem deutschen Onlineschraubenhandel werde ich fündig und ein paar Tage später liegt ein ganzes Sortiment auf meinem Tisch.

Sorgen macht mir noch der Taumelscheibenmitnehmer. Der soll ja eigentlich die Taumelscheibe vor Verdrehung bewahren, was er so nicht wirklich gewährleisten konnte. Ein paar Grad waren immer drin, bis der Mitnehmer an einem Pin anlag, was nun wirklich nicht geht. Ich muss als ein paar kleine Modifizierungen vornehmen.


Aufbau des Heckrotors

Das Heck samt Winkelgetriebe wird jetzt mit dem entsprechenden Riemen versehen und für den Einbau vorbereitet.
Die Mechanik wird montiert
Inzwischen sind die Servos und der Graupner GR-18 eingetroffen. Schon offenbart sich das nächste Problem. Leider passt der Lochabstand der Servos nicht, 2mm zu groß – eine Clonemechanik eben – schlecht kopiert. Also mittels Fräser die Löcher Seitenteilen auf Maß bringen. Dumm nur, das dann die Aluteile mit den Hauptwellenlagern sich mit verschieben, was sich dann jedoch hoffentlich mit Beilagen ausgleichen lässt.
Ebenfalls als problematisch erweist sich die Suche nach einem geeigneten Standort des Empfängers. Nach vielem probieren, messen und testen, entscheide ich mich für den Einbau in den Rahmen. Wenn einmal drin, komme ich zwar nicht mehr ran(für Updates usw.) aber die Einstellungen macht man ja bei Graupner über die Fernbedienung.
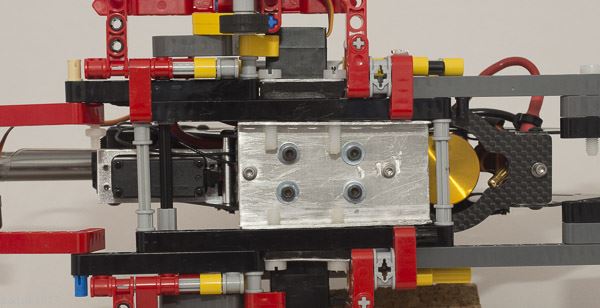
Für den Empfänger mit Flybarlesssystem fertige ich eine spezielle Bodenplatte aus Aluminium mit den passenden Gewindebohrungen. Die Platte dient zum Einen der Befestigung des GR-18 und zum Anderen als stabile Konsole um das Gewicht des späteren Legocopters in die Mechanik einzuleiten. Es geht zwar eng zu, aber es sollte funktionieren.


Durch die Einpassung des Empfängers in die Mechanik ist nur noch der Regler außen an einem Seitenteil befestigt. Ich brauche ja noch etwas Platz im inneren des Legocopters für die vielen Zusatzfunktionen.
Der Heckservo sitzt relativ niedrig. Die ordentliche Führung der Hecksteuerung ist nur mit Biegung einer Etage in die Heckanlenkung möglich.
Mit Hilfe von 3 Distanzscheiben konnten die erwarteten Abstände zwischen HZR und oberen Hauptwellenlager ausgeglichen werden.
Rund 12 Arbeitsstunden sind bisher angefallen und die Mechanik steht bereit zur Einstellung auf meinem Tisch.

Die Hochzeit – Einbau der Mechanik in den Hubschrauber.

Diese Mechanik muss zusammen mit dem Akku nun in den Legohubschrauber.

Dazu demontiere ich den originalen Lego-Hubschrauber bis auf den Grundrahmen, den Bug und den mittleren Seitenstreben.
Schon seit meinen ersten Überlegungen zum Heli, suche ich eine praktikable Lösung für die Fahrwerksmechanik, letztlich mit dem Ergebnis, einen Teil der Original-Lego-Mechanik weiterhin zu nutzen und jeweils einen Miniservo für Bug- und Hauptfahrwerk einzusetzen.

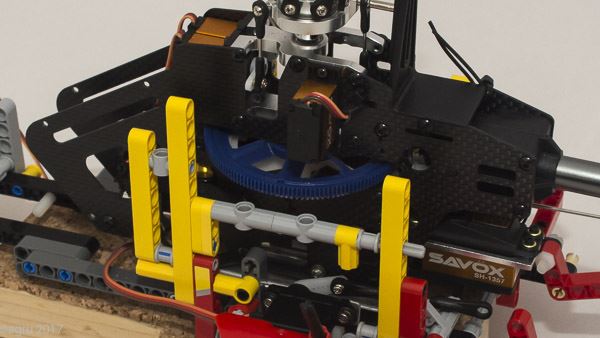
Jetzt wird die Mechanik im Rumpf positioniert. Dabei ist das Hauptzahnrad (HZR) der Casus Knacktus, denn es sollte sich ja schließlich um Rumpf frei drehen können, ohne das irgendwelche Streben des Lego-Rahmens im Weg sind. Als beste Position ergab sich die Stellung zwischen den beiden senkrechten Rumpfstreben und so weit wie möglich nach vorn. Hier wird wieder ein Problem entstehen, was allerdings erst nach Fertigstellung offenbar wird – die Schwerpunktlage. Bei der Einbauhöhe ist auf die Position der HZR zur Querstrebe der Hauptfahrwerksabstützung zu achten.
Nachdem die Position der Mechanik feststeht, kann ich die beiden Konsolen zur Verbindung zwischen Mechanik und Rumpf aus Aluminium anfertigen.
Die Rettungswinde
Der eigentlich kniffligste Punkt auf meiner Agenda war von Anfang an die seitlich angebrachte Rettungswinde. Hier habe ich ein Jahr vorab im Netz recherchiert und nach Umsetzungsmöglichkeiten gesucht. Mit den vielen verschiedenen Ideen will ich niemanden langweilen. Kommen wir direkt zur realen Umsetzung.
-

Erforderlich ist ein langsam laufender Mikromotor und ein passender Regler mit Rückwärtsgang, denn die Winde soll ja das Seil ausrollen und auch wieder einziehen können. Alle üblich Fahrtregler, die ich im Netz finden konnte waren viel zu schwer und zu groß. Irgendwann stieß ich auf einen ganz kleinen Fahrregler für Minimodellautos mit Bremsfunktion und Rückwärtsgang.
-

Auch wenn dessen BEC mit 1A recht schwach für die gesamte Stromversorgung ist, reichen die 1 Ampere locker aus die kleinen Servos zu bewegen. Die „stromhungrigen“ LEDs werden separat mit 7,2 Volt versorgt. Dazu bestelle ich einen Mikromotor mit Getriebe, der bei 5 V nur 40 U/min auf der Ausgangswelle hat.
-

Es ist auch hier wieder viel Tüftelei, bis ich die, vom Prinzip her einfache und eigentlich naheliegende Lösung habe. Ich muss es nur schaffen eine genau mittig angesetzte Bohrung in den kleinen 4-Kant-Stab einzubringen. Beim zweiten Versuch habe ich Erfolg.
Die Seilwinde nun komplett montiert.
Eine entsprechende Position über die rechten Schiebetür ist auch gefunden, bleibt nur noch das „Seil“. Das Originale ist leider zu kurz, hat jedoch die richtige Flexibilität.
Alle Bindfäden, die ich so im Haushalt finde, sind zu unflexibel. Erst im Nähkasten meiner Frau werde ich fündig – Sockenstopfgarn – der ist praktisch identisch mit dem originalen „Seil“. Also 2 Meter sind meine, abgewickelt und ab auf die Winde.
Einbau der Beleuchtung
Es soll die übliche Positionsbeleuchtung, ergänzt mit einem beweglichen Lande- und Arbeitsscheinwerfer werden. Beim LED-Profishop werde ich fündig und bestelle ein Heliset mit hoher Lichtleistung, was direkt mit 7,2 Volt betrieben werden kann. Allerdings möchte ich den Landescheinwerfer getrennt von der Positionsbeleuchtung schalten. Dafür gibt es einen RC-Schalter genannt Ultra Switch II, mit dem ich per Fernbedienung 2 Schaltstufen festlegen kann. Dazu muss natürlich die entsprechende Scheinwerfer-LED von der Hauptelektronik getrennt werden und separat angesteuert und mit Spannung versorgt werden.


Der weitere Ausbau und Aufbau des Rumpfes
Der kleine Fahrtregler dient zur Steuerung der Winde und als BEC für die Zusatzfunktionen. Sein Platz befindet sich unter der Akkuauflage.
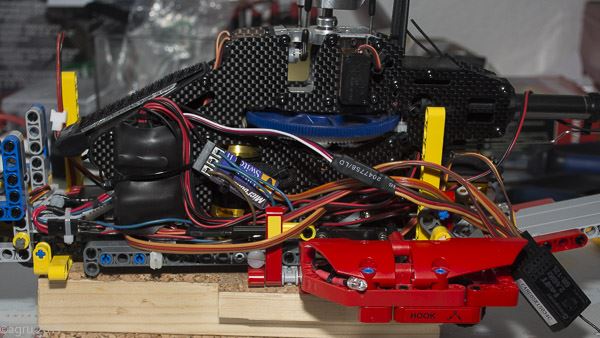
Die Kabel sortieren sich langsam. Links im schwarzen Schrumpfschlauf ist die LED-Elektronik untergebracht, rechts daneben der Zwei-Wege-Schalter zur Steuerung der Beleuchtungsfunktionen.
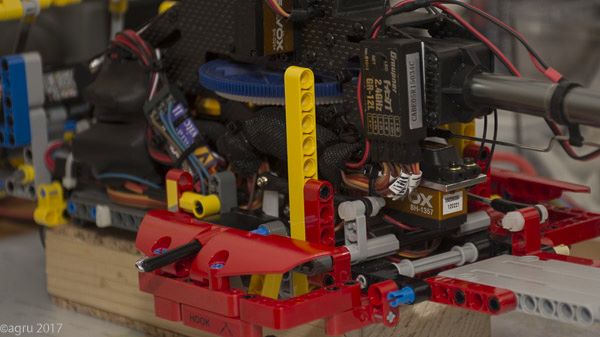

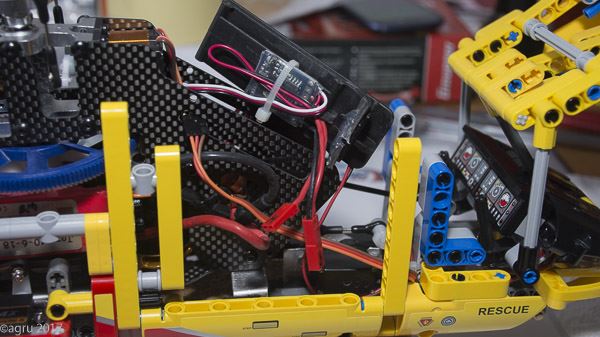
Die Winde ist positioniert. Das kleine Akkupack für die Zusatzfunktionen wird später noch nach hinten verlegt.
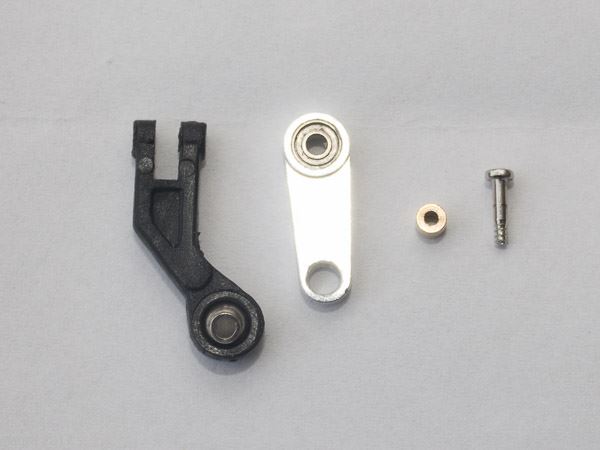
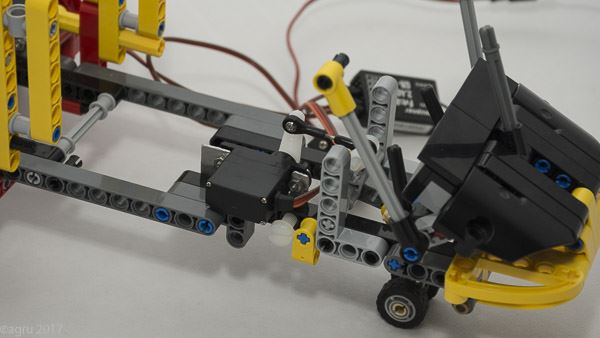
Die voll funktionsfähige Heckklappe stand ursprünglich nicht auf meinem Anforderungskatalog. Allerdings wünscht sich mein kleiner zukünftiger Copilot, der meistens auf den Namen Oliver hört, unbedingt diese Funktion, schließlich müssen ja auch Passagiere ein- und aussteigen können. Die Fantasie spielt bei der kindlichen Begeisterung hier eine besondere Rolle. Also ist noch eine Lösung gefordert. Wieder kommt ein kleiner Miniservo zum Einsatz, der mit per Kopfgestänge eines Mikado Logo 10 mit der Heckklappe verbunden wird.
Wie befestige ich nun den Lego-Mann? Im Internet bin ich auf kleine Neodym-Topfmagneten gestoßen. Dazu noch einen kleinen 3mm Rundmagneten, in die Schwimmweste eingesetzt und schon haben wir eine recht kräftige magnetische Verbindung. Allerdings im Flug mit einem pendelnden Seil den Lego-Mann zu erwischen halte ich für kaum für machbar, auch wenn die Magnete noch so stark sind. Versuch macht klug.



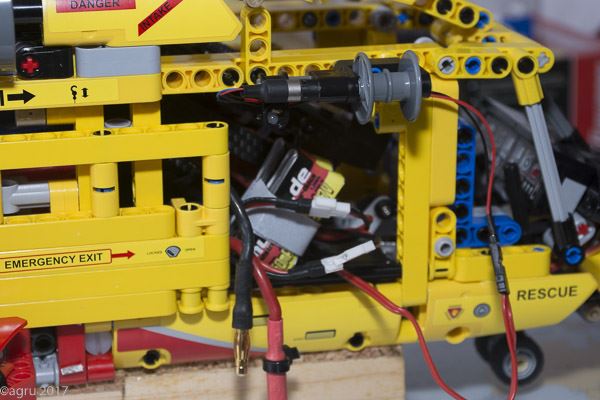
Dieses kleine Akku-Pack wandert von vorn nach hinten und verschwindet praktisch hinter der rechten Heckverkleidung.
Einen Platz für den Zusatzakku habe ich auch im Heck gefunden, allerdings passt hier der vorgesehene Akku nicht mehr. Ich ordere 2 Stück 3,7V 350mA Miniakkus, die ich in Reihe schalten werde. Die Kapazität reicht gerade so für die Zusatzfunktionen bei 3 Flügen. Dafür liegt jetzt der Schwerpunkt fast unter dem Hauptrotor. Noch 5 Gramm Blei in die Heckflosse und siehe da, der Schwerpunkt passt.
Beim Auswiegen kam was kommen musste. Der Schwerpunkt des nun eigentlich startbereiten Legocopters ist deutlich kopflastig. Nach meinen verschiedenen Überlegungen bleiben nur 2 Möglichkeiten. Der Flugakku muß leichter werden und der Akku für die Zusatzfunktionen muss von vorn so weit wie möglich nach hinten in das Heck. Einen 40 Gramm leichteren 3S 2600 mA Akku bestelle ich gleich im Doppelpack
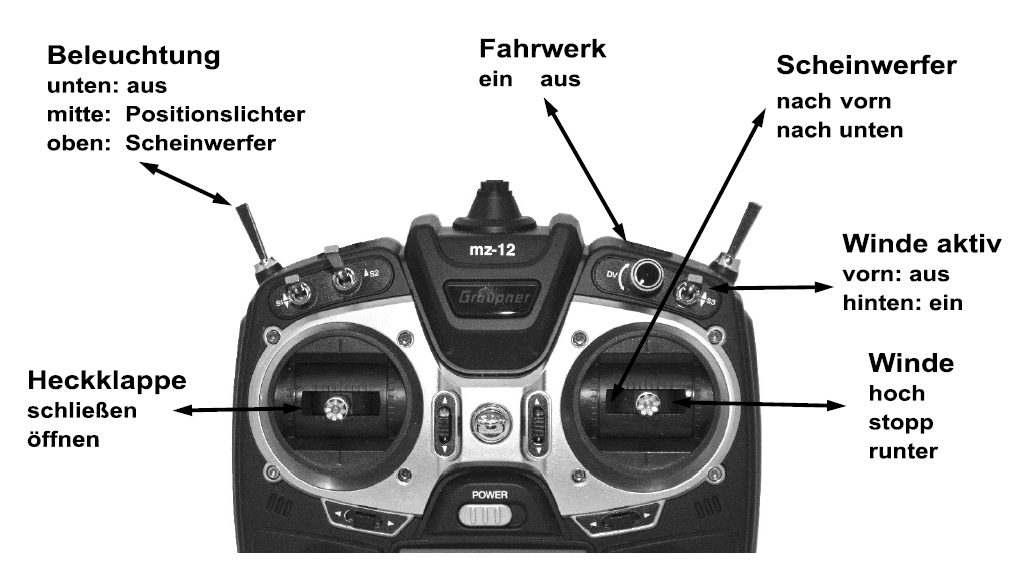
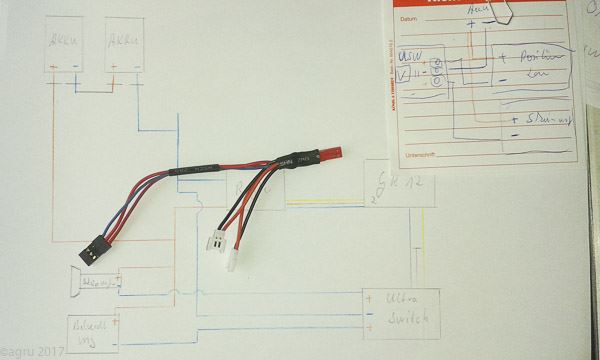
Ich habe noch eine Art Übersicht erstellt, als Hilfestellung für den Junior. Diese wird an der Fernsteuerung befestigt und kann so jederzeit als Hilfestellung dienen. Ich gehe davon aus, dass diese trotz Vorabtrainings gute Dienste leisten wird.

Seit dem Baustart ist viel Zeit vergangen. Heute ist der 15.06.2017, 18:30 Uhr. Das Wetter ist schön, kaum Wind und der Legocopter steht „ready for take off“ auf dem Flugplatz.
Alles klar für den Jungfernflug
Also Start – was soll’s und – er fliegt und nicht mal schlecht. Besser als erwartet. Er ist zwar etwas schwerfällig, klar bei 1760 Gramm Startgewicht und nach 4 min ist der Akku leer gesaugt. Egal. Gleich noch 2 Flüge mit etwas Feintuning an den Einstellungen und der Heli ist fit für weitere Einsätze.






Bei Scaleflügen und gemeinsamer Nutzung der beiden Fernbedienungen durch Pilot und Copilot treten leider häufig Verbindungsstörungen auf dem Rückkanal des Hauptsteuerungssystems auf. „Nicht gut“. Hier muss eine Lösung her. Meine Tests ergeben, das die Position der beiden Fernbedienungen zueinander auf die Signalverlust Einfluss hat. Stehen Pilot und Copilot um 90 Grad versetzt zum Modell treten keine Störungen auf. Je weiter sich die Positionen der 0 Grad- bzw. der 180 Gradmarke nähern, erhöhen sich die Verluste.
Ich ersetze zwangsläufig den 2,4 GHz GR-12 Empfänger durch einen 35 MHz R16 Empfänger ebenfalls von Graupner. Dieser ist zwar deutlich länger und etwas breiter als der GR12 und passt leider so nicht an die bisherige Position. Ich entferne also das Gehäuse, schrumpfe die Platine ein und gewinne so die notwendigen Millimeter. Jetzt muss ich nur noch die 1m lange Antenne gut verstecken und alles wieder zusammensetzen. Zur Steuerung bringe meine gute „alte“ Graupner MX16 wieder zum Einsatz. Die Programmierung gelingt mir analog zur bisher genutzten MZ-12. Außer das jetzt der Copilot die Antenne bei der Flugvorbereitung herausziehen muss, gibt es bei der Bedienung der Zusatzfunktionen keine Veränderung. Doch - Der Drehregler für die Fahrwerkssteuerung ist jetzt links oben und nicht mehr rechts oben.
Der Lego-Helikopter im Rettungseinsatz 2017
Dieser Inhalt kann leider nicht angezeigt werden, da Sie der Speicherung der für die Darstellung notwendigen Cookies widersprochen haben. Besuchen Sie die Seite Datenschutzerklärung, um Ihre Cookie-Präferenzen anzupassen.
Die Saison 2017 ist zu Ende. Von der Planung bis zum heutigen Tag sind 2 Jahre vergangen. Der Film zu diesem Projekt ist im Kasten, geschnitten und veröffentlicht. Der Legocopter hat inzwischen 30 Flüge problemlos absolviert. Alles funktioniert und hält, obwohl alle Teile original gesteckt sind, nichts verklebt.
Dreharbeiten des MDR für einen Reportage am 8.September 2018
Dieser Inhalt kann leider nicht angezeigt werden, da Sie der Speicherung der für die Darstellung notwendigen Cookies widersprochen haben. Besuchen Sie die Seite Datenschutzerklärung, um Ihre Cookie-Präferenzen anzupassen.
Diese Seiten entstanden mit freundlicher Unterstützung der Afono GmbH - Kassensoftware für Einzelhandel, Großhandel und Auftragssoftware mit Kassenmodul für den Siquando Pro Shop